04. Answer: Tracking Intro
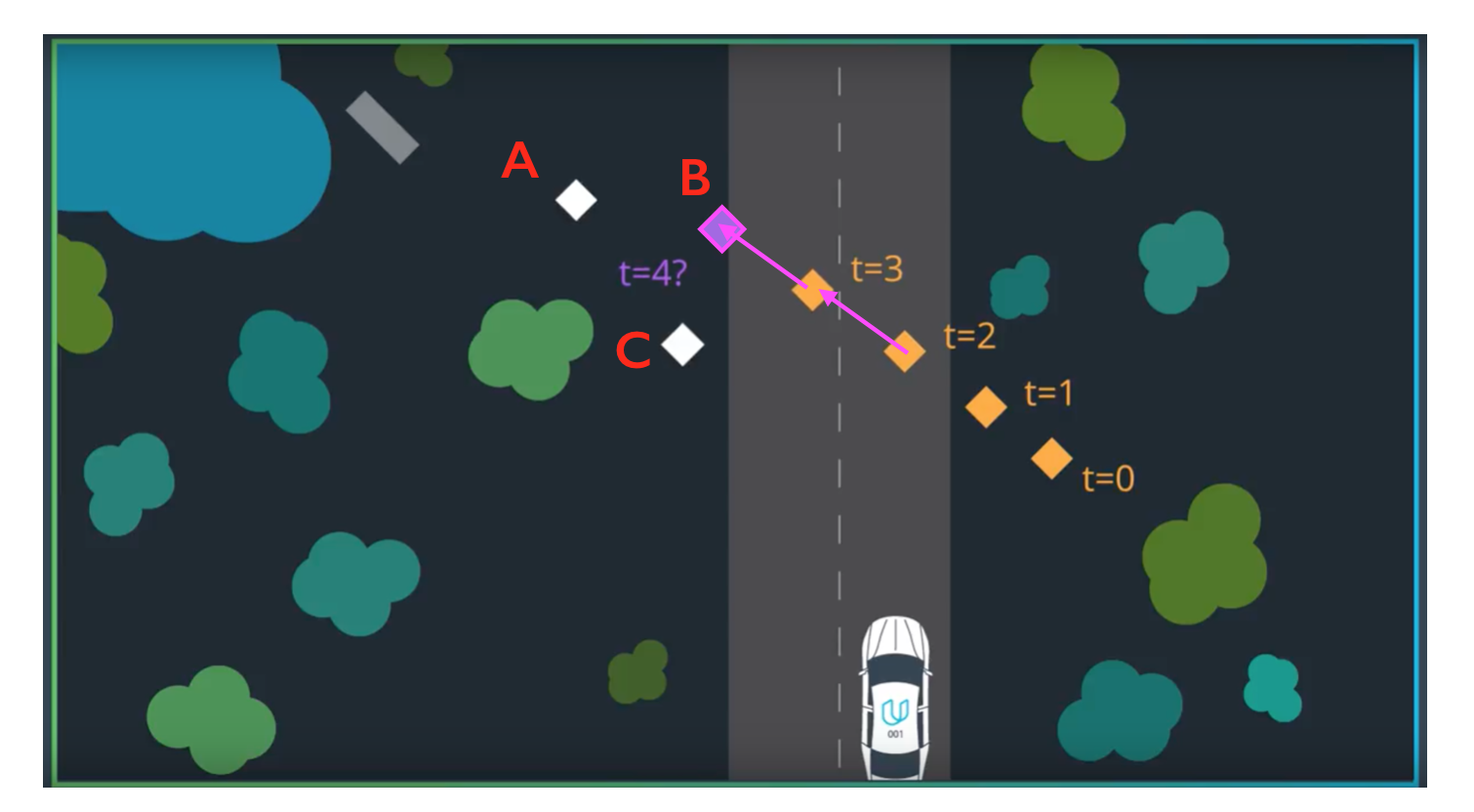
Position at time t = 4.
Inferring Velocity
From the earlier positions, we can infer the velocity (indicated by the pink arrow in the image) of the object; the velocity appears to be u and to the left by a fairly consistent amount between each time step.
Assuming no drastic change in velocity occurs, we predict that at time t = 4, the object will be on this same trajectory, at point B.
Kalman Filter
A Kalman filter gives us a mathematical way to infer velocity from only a set of measured locations. In this lesson, we'll learn how to create a 1D Kalman filter that takes in positions, like those shown above, takes into account uncertainty, and estimates where future locations might be and the velocity of an object!